近日,上海交大机械系统与振动国家重点实验室何清波教授、彭志科教授团队在Cell姊妹刊Matter上在线发表了题为“Stimuli-responsive metamaterials with information-driven elastodynamics programming”的研究论文,提出了信息驱动的弹性动力学编程概念,创造了一种结构振动感知信息的新方式。论文的第一作者是博士生李崇,通讯作者是彭志科教授和何清波教授。
生物的刺激响应性是一种对外界环境刺激表现出适应性功能反应的能力,例如含羞草感知环境振动而自适应合拢,捕蝇草感知猎物触碰而自适应捕虫,松果感知环境湿度而自适应变形等。生物的刺激响应性也启发了人们对功能型智能材料的广泛研究。目前,刺激响应性材料能够改变物理或化学性质(如形状、颜色或硬度等)以响应外部刺激,已有研究仍局限于可编程的弹性静力学特性,来设计功能型的形态变化。然而,在刺激响应材料系统中,实现弹性动力学特性的可编程仍然是一个重大的挑战,在用来探索构建全材料仿生智能系统中,具有非常重要的研究价值。
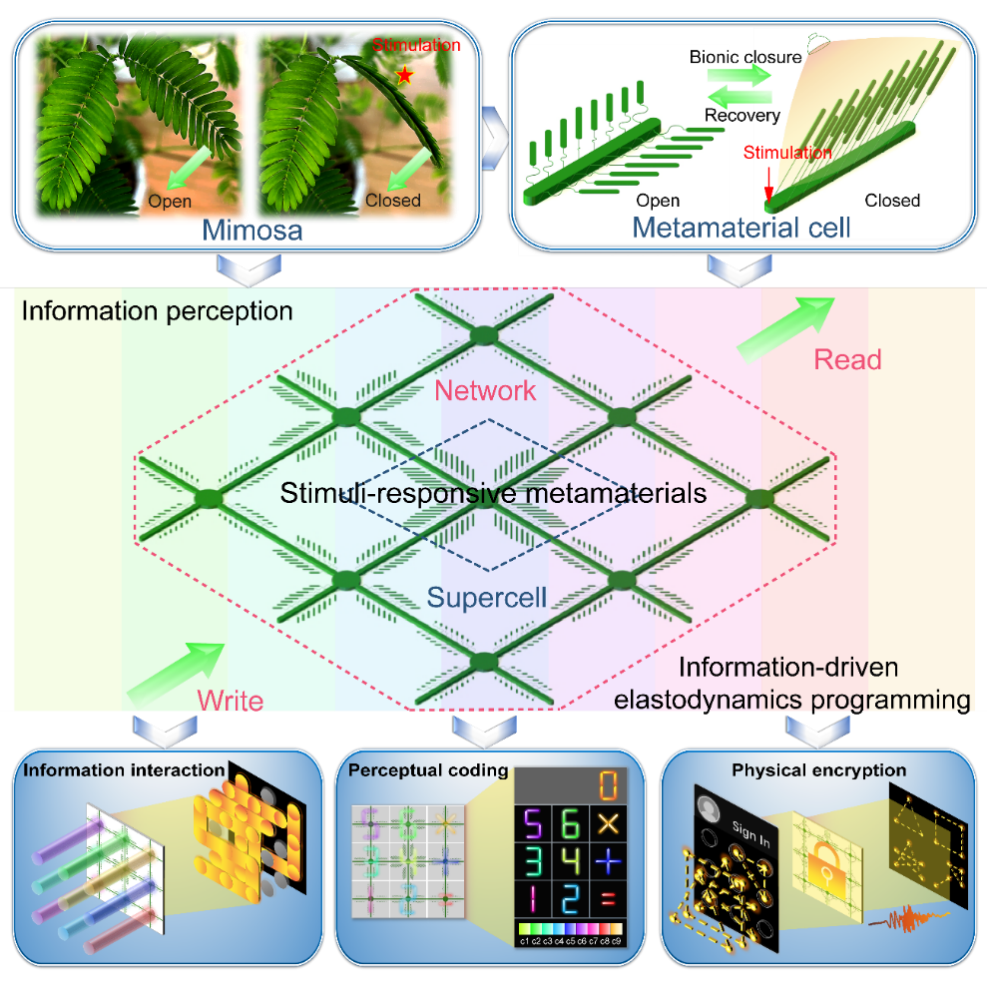
信息驱动弹性动力学编程的刺激响应超材料
为了解决这一动力学难题,研究人员设计了一种实现信息驱动弹性动力学编程的仿生刺激响应超材料,该材料通过模拟含羞草叶片的刺激闭合行为,表现出感知环境变化的刺激响应能力。研究首次提出了信息驱动弹性动力学编程的概念,即外部刺激信息以弹性动力学特性的形式编程写入所提出的超材料系统,然后通过对系统中传输的弹性波信息进行解码读取。研究提出的刺激响应弹性超材料由形状记忆谐振器构成,其结构状态在环境刺激下发生自适应闭合,并且局域共振状态由无序态变为有序态。研究人员提出了自适应无序—有序共振转换动力学理论,设计了具有不同共振状态的超材料单胞,进一步构造了多种超材料超胞,最后搭建了刺激响应超材料网络系统。在环境信息刺激下,超材料网络节点的局域共振状态发生转变,且被自适应地编程到整个系统网络的全局动力学响应中,从而实现了信息驱动的弹性动力学编程。
这一概念创造了一种全新的机械式读写操作,实现了一种全材料结构下刺激信息的本体感受。论文通过对振动刺激信息的感知,展示了在刺激信息交互、感知编码计算和物联网物理加密方面具有广泛的应用前景。此外,这一工作还可能为全材料智能系统打开新的机遇,并对全材料智能信息感知装置的设计产生广泛的影响,如传感、计算和通信等。
研究工作得到了国家自然科学基金创新研究群体和面上项目、中组部“万人计划”青年拔尖人才支持计划的资助。近年来,何清波教授在机械装备动态监测与故障诊断领域,开展了为结构赋予智能的前沿探索研究,在弹性波编码感知技术方面取得了创新性成果。
